Applications for Safety Analysis
One of the beautiful aspects of Hamilton-Jacobi Reachability analysis is the generality of the technique. To perform a safety analysis, you need:
A system that evolves over time (preferably according to a set of ordinary differential equations, though we are working on adapting to systems that cannot be written easily this way)
A set of conditions that are considered unsafe and/or a set of goal conditions
Optional:
Inputs to the system that you can control
Disturbances or other players that may interfere
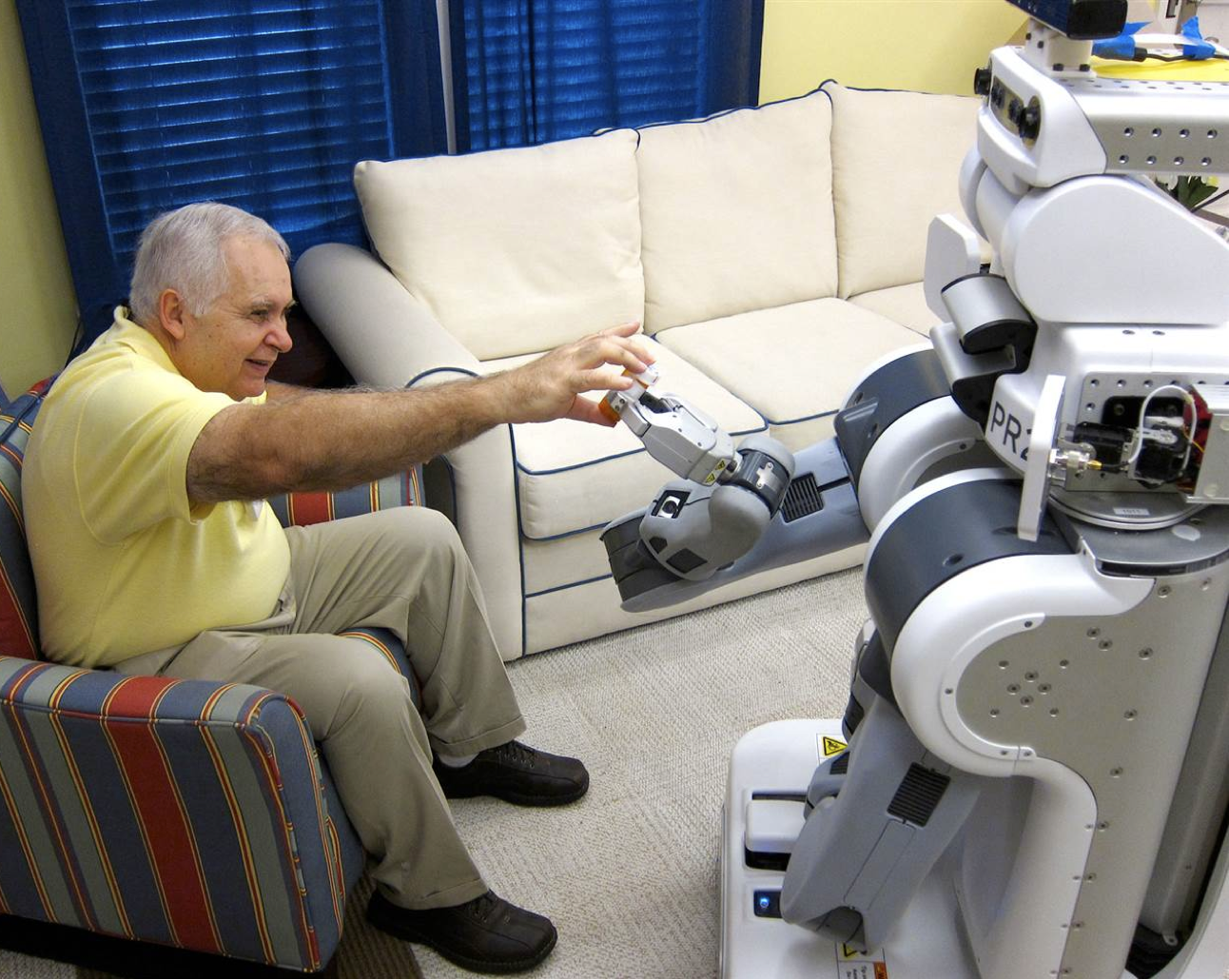
With this information, we can find the set of states from which the system will be guaranteed to reach its goals and avoid unsafe areas within a given time horizon despite worst-case disturbances. Moreover, we can provide the optimal inputs to the system to achieve this guarantee. Given how general these requirements are, we are excited to look for applications across a broad range, such as biological/medical systems, human-robot interaction, industrial systems, and more.
These applications will raise new challenges and inspire future research: How do we define safety in these cases? How do we model the system and the environment? How can we incorporate uncertainties intelligently? How can we balance worst-case vs. expected scenarios?
Example papers beyond standard robotics:
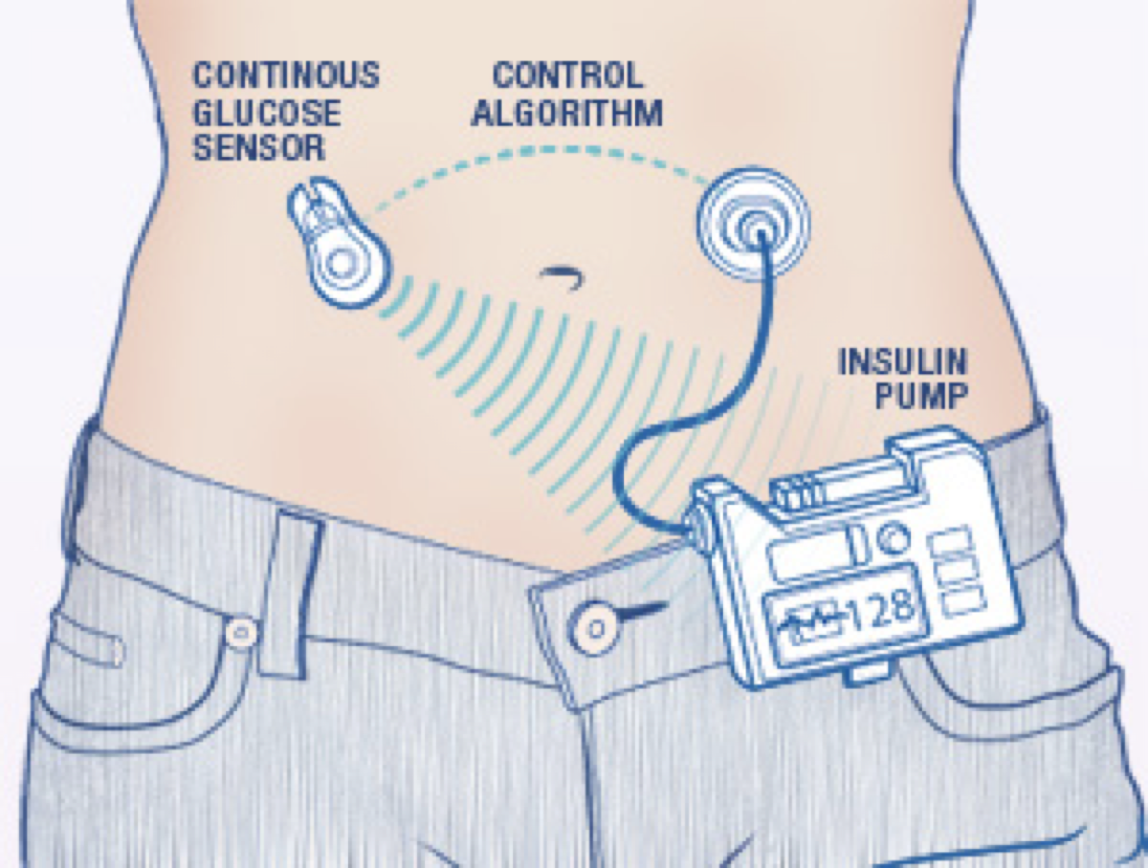
Haptics and medicine: Haptic Virtual Fixtures for Telemanipulation Using Control Barrier Functions (Transactions on Haptics)
Biological Systems: Approximate Hamilton-Jacobi Reachability Analysis for a Class of Two-Timescale Systems, with Application to Biological Models (IEEE Conference on Decision and Control)
Battery Management: Simultaneous improvement of control and estimation for battery management systems